ミニドローン
SYMA X21W(カメラ内蔵タイプ)
(2017年6月17日使用開始)
SYMA X21W
●SYMA X21W の 導入 と 同梱品 ●スペック ●送信機 のみで操縦する方法 と ●スマホ のみで操縦する方法 ●送信機 と スマホを使って操縦 ●送信機のヘッドレスモードの設定 と |
●360度宙返り(フリップ)をする方法 ●アプリ「SYMA GO」の ●キャリブレーションの手順 ●モード2 の スティック操作一覧表 ●カメラの 画角(視野角)を比較 ●バッテリー の 規格と寸法 ●互換バッテリーの ●機体の分解方法 |
商品 の 導入 と 同梱品
2017年06月17日に入手しました。
この SYMA X21W は、暇な時ちょっと屋内で飛行したり、散歩の時に一緒に持って行き、空き地や公園で飛ばすことが出来ます。
このような目的で使うのに、手頃な値段と大きさだと思います。
200g以下の機体なので室内はもちろん、日本の航空規制の対象外なので、近くの公園でも手軽に飛行を楽しめるのがGOOD。
ある程度高度を自動で維持してくれるので操縦が非常に楽で簡単です。
試しに Hubsan X4 HD H107C と比較すると、前後左右の操作は同じような感覚で安定した飛行をしてくれます。
H107C は上下調整を常に意識して操縦しますが、SYMA X21W には高度維持機能が付いているので上下調整の頻度が非常に少なくて済みます。
モーターの軸間寸法が全く同じよく似たミニドローンです

Phantom の送信機の小型版のようなデザインの手頃な大きさの送信機が付いているので、楽しみ方の幅が広く面白そうです。
送信機を使用すると、屋外でも目視範囲であれば充分飛行を楽しめます。
私の Phantom 3 と同じモード2となっていますので、暇な時に屋内で送信機のスティック操作に慣れる練習も手軽に出来ます。
2017年4月に発売され、国内の通販 Amazon 等で入手できます。
注意・・・よく似た Syma X21 にはカメラが付いていません。(型名の最後にWが付いていません)
商品の梱包ケースです。
| 箱の表 | 箱の裏面 |
 |
 |
商品の同梱物です。
本体、送信機、スマホクリップ、予備のプロペラ4個、充電用USBケーブル、ドライバー、説明書、バッテリー(本体に取り付け済み)

商品 の 特徴(感想)と不満点
商品の特徴(実際に使用した感想も含みます)
●付属の送信機でも、スマホだけでも操縦できます。スマホにはアプリ「SYMA GO」をインストール。
操縦方法・・・送信機のみ、送信機+スマホ、スマホのみ の3種類の操縦方法があります。
スマホのみの操縦の場合、画面のスティックでの操縦 と スマホの傾きを利用した直感的な操縦の2通りの方法があります。
送信機+スマホ で使用する時は、送信機にクリップを差し込み、クリップにスマホを挟んで取り付けます。



| ●プロペラガードは取り外しできませんが、屋内で遊ぶことが多いミニドローンの場合は安全で役に立ちます。 壁に当たっても墜落せずに連続して飛行できました。人に当たっても安心です。 ●高度維持機能が付いているので、ドローンは現在の高度を保って飛行してくれます。 飛行中、時々高度を修正してやるだけなので操縦が非常に楽です。 (前後左右の操作は常に必要です) ●屋内でも屋外でも結構安定した飛行をしてくれます。 ●付属のバッテリーを使い、屋外での飛行で離陸から着陸まで 5分以上の飛行が出来ました。 右の屋外での飛行風景では、ヘッドレスモードを使用しています。 |
屋内での飛行風景の一部です YouTubeの動画にジャンプします
|
| ●ワンキー離陸で、プロペラを回転させ約1メートルの高さまで自動で上昇し、高度を維持します。 ●ワンキー着陸で、ドローンを安定して着陸させプロペラを停止します。 ●低速と高速のモードを持っていますので、操縦の慣れや、室内・屋外に応じた設定で飛行できます。 ●高度が安定しているので、前後左右の操作に集中でき、初心者でもベテランでも楽しく遊べます。 ●ヘッドレスモードが付いているので、機体の向きにかかわらず前後左右の操作を直感的に行えます。 ●送信機が付いているので操縦そのものを楽しめ、細かな操作も可能です。 ●スマホのみでも操縦できるので、荷物を減らし手軽に持ち出して飛行を楽しむことが出来ます。 特に、スマホの傾きで操縦するモードとヘッドレスモードを組み合わせて使うと面白いです。 ●6軸ジャイロ機能を内蔵しているので、機体が小さい割に安定した飛行をします。 ●30万画素の映像がスマホにリアルタイムに送られてくるので、映像を確認しながらの操縦(FPV)ができます。(航空規制の対象外なのでFPV操縦が出来ます) 送信機+スマホ、又は スマホのみで利用します。 ●ワンキーで360度宙返り飛行が簡単。宙返りの時30cmぐらい上昇するので周りの広さに注意してください。 ●LEDライトが付くので、暗い部屋での飛行も面白いです。 ●スマホに写真やビデオを記録することができます。 (ただし少し粗い画像になります) 右下に内蔵カメラで録画したサンプル動画を添付しました。 |
機体の後部中央に見える白いものは  |
| 不満点(実際に使用した感想です) ●機体を軽くするため小さなバッテリーを使用しているので、操作に慣れると飛行時間が少し物足りなくなります。 ●屋外で飛行する時、少し風があると機体が小さく軽いので風の影響を受けやすいです。 ●WiFi を使用してリアルタイム映像の伝送を行っているため、飛行中に時々映像がカクカクします。 |
内蔵カメラから |
商品 の スペック
| 送信機 | モード2 |
| 送信機 周波数 | 2.4GHz 4チャネル |
| スマホ | WiFi 2.4Ghz 接続 |
| 映像 伝送 | WiFi にてスマートフォンと接続(リアルタイム映像をスマホに録画できます) |
| ジャイロ | 6軸 |
| 気圧センサー | 高度維持機能で安定したホバリングが可能 |
| WiFi カメラ | 0.3MP・・・WiFiで送られてくる画像をスマホに記録 480P 画質でスマホに録画 (写真/ビデオ) |
| 機能 | ワンキー離陸/ワンキー着陸/高度維持/ ヘッドレスモード/360度宙返り 高速・低速切替/指定軌道を飛行 注意・・・ワンキーリターンは付いていません 低電圧保護回路・・・後ろのグリーンLEDが高速で点滅します。さらに残量が減るとゆっくり着陸します。 |
| モーター | コアレスモーターと思われます(Hubsan社製 X4 HD H107Cと同じ形状です) |
| 送信機の電池 | 1.5Vの単3電池 4本使用(付属していません) |
| バッテリー | 3.7V 380mAhリポバッテリー (バッテリーの交換可能) |
| 充電時間 | 約90分(過充電保護モジュール搭載) 充電用USBケーブルが付属しています |
| 飛行時間 | 約5分(実際に使用すると5分以上の飛行が出来ました) |
| 操縦可能範囲 | 送信機 約100メートル WiFi接続 約25メートル 実際に自分で測定した結果は下記のようになりました 送信機で操縦した場合 135m(充分遊ぶことが出来る操縦可能範囲だと思います) スマホのWiFiで操縦した場合 58m(参考・・WiFi中継器を使用した場合は 122m) |
| 機体の寸法 | 横 13.6 x 縦 13.6 x 高さ 3.1cm(プロペラガード付き) |
| 商品の重量 | 48.1g |
送信機のみで操縦する方法 と 送信機の機能と調整方法
1.機体と送信機をペアリングする。(ペアリング を バインド と表現することもあります)
まず送信機の電源を入れます。
次に機体にバッテリーを接続し電源を入れると機体後部のグリーンのLEDが高速で点滅します。
さらに機体前部の赤いLEDが点滅するのを待ちます。
送信機の左スティックを上に倒すとピッとなり、続けて下に倒すとピッとなる。
ここまでで機体と送信機のペアリングが完了。
機体後部のグリーンのLEDが高速の点滅から点灯に変わります。
2.基本的な飛行の操作は 送信機 操作一覧表を参照
飛行中にバッテリーが無くなると、機体後方のグリーンのLEDが点滅を始めます。
3.送信機の各スイッチの機能
この機種では、送信機の左肩の「写真撮り」と「ビデオ」は機能しません。(これはSDカード用です)

4.飛行速度の設定(低速、高速)
右スティックを短くクリックする毎に切り替わります 低速 → 高速 → 低速 → 高速・・・
低速・・・右スティックをクリックする(押し込む)と「ピッ」と1回鳴ります。
高速・・・右スティックをクリックする(押し込む)と「ピッピッ」と2回鳴ります。
右スティックを3秒以上長くクリックする毎にヘッドレスモードと標準が切り替わります。
ヘッドレスモード・・・「ピッピッピッピッピッピッピッピッ」と8回ぐらい鳴ります。
標準モード・・・・・・「ピ~~~~~~~~」と2~3秒連続音が鳴ります。
ヘッドレスモード時は、機体後部のグリーンのLEDが 3秒間点灯→消灯→3秒間点灯→消灯 を繰り返します。
ヘッドレスモードの飛行方向を修正する方法
・ヘッドレスモードで飛行中に障害物に衝突したりすると、飛行方向にずれが発生することがあります。
・飛行方向のずれを修正する時は、機体の前方を前進する方向に向けてから、左右のスティックを左下に同時に倒します。
・LEDが3秒間高速で点滅した後、点灯すれば飛行方向の修正完了です。
7.トリムの調整方法(機体の前後左右への流れを小さくする)
ホバリング時に右側のスティックで前後左右の操作をしていなくても常に機体がいずれかの方向に流れる時、調整でこの流れを小さくする。
必ず同じ方向に流れてしまう場合にのみ有効です。
●送信機と機体をペアリングした状態で調整します。
●左のスティックのレバーを押し込んだままにします。1回「ピー」となります。電源ボタンのランプが点滅します。
●右のスティックを機体が流れる方向と逆に倒してから離します。倒す都度「ピッ」となります。流れが大きい時は数回繰り返します。
斜め方向に流れる時は、前後と左右の両方を調整します。
●倒した時「ピ~~~」と長音がなった時は、中立の位置となります。
●調整が終わったら、左スティックを離します。
ホバリング時に左側のスティックで左右回転の操作をしていなくても常に機体がいずれかの方向に回転する時、調整でこの回転を小さくする。
必ず同じ方向に回転してしまう場合にのみ有効です。
●送信機と機体をペアリングした状態で調整します。
●左スティックのレバーを押し込んだままにします。1回「ピー」となります。電源ボタンのランプが点滅します。
●左のスティックを押し込んだまま、左のスティックを機体が回転する方向と逆に倒してから中立に戻します。倒す都度「ピッ」となります。
●倒した時「ピ~~~」と長音がなった時は、中立の位置となります。
●調整が終わったら、左スティックを離します。
●トリムの調整を行っても、ホバリング中に機体が前後・左右に流れるときには、キャリブレーションを実施します。
キャリブレーションしても流れが小さくならない時は、プロペラやプロペラガードを点検します。
スマートフォンのみで操縦する方法
1、スマホを機体のWiFiに接続(ペアリング)する。(ペアリング を バインド と表現することもあります)
機体にバッテリーを接続し電源を入れると機体後部のグリーンのLEDが高速で点滅します。
さらに機体前部の赤いLEDが点滅するのを待ちます。
スマホのWiFi設定で機体のWiFiに接続します。
(iPhoneの場合)
「設定」→「WiFi」をタップ。
ネットワークの選択で、FPV WIFI xxxxxx をタップして選択。
接続されると FPV WIFI xxxxxx の頭にチェックマークが付く。
(Androidの場合)機種により少し異なるかもしれません
「設定」→「WiFi設定」をタップ。
一覧表の中で、FPV WIFI xxxxxx をタップして選択し接続する。
接続されると FPV WIFI xxxxxx が一番上の行になり、下に[接続済み]と表示される。
スマホのアプリ SYMA GO を起動し
画面に、機体から送られてくるリアルタイム映像が表示されればOKです。
機体後部のグリーンのLEDが高速の点滅から点灯に変わります。
映像が表示され無い時は、一旦 SYMA GO を完全に終了させてから再度起動します。
ここまでで機体とスマホのペアリングが完了。
2、アプリ SYMA GO を起動する
アプリの START をタップし操縦用画面を出す。
画面に、機体から送られてくるリアルタイム映像が表示されればOKです。
機体後部のグリーンのLEDが高速の点滅から点灯に変わります。
映像が表示されない時は、SYMA GO を一旦 完全に終了させてから再度起動します。
3.飛行速度の設定(低速、高速)
スマホ画面の下の「飛行速度の切り替え」アイコンをタップし、L/低速、H/高速 の表示を切り替えます
4.各操作は アプリ SYMA GO の画面で行います。
自動離陸/着陸、ヘッドレスモード、写真や動画の撮影 等
飛行中にバッテリーが無くなると、機体後方のグリーンのLEDが点滅を始めます。
●アプリ画面上の操作パッドで操縦する方法
中央の丸い点を指で押さえスライドします。
基本的な飛行の操作は送信機と同じです。(参考 操作一覧表)
●スマホの傾きで操縦する方法(Gセンサー機能が付いたスマホのみ使用可能です)
画面下部中央の□のような形をした「スマホの傾きで操縦」アイコンをタップして有効/無効を切り換えます。
前進後進/左右移動 を スマホの傾きで操作します。
スマホを傾けると画面上の右側の前後/左右用のパッドのみが傾きに合わせ移動します。
左側のパッドで、上昇/下降/左右回転 を 指の操作で行います。
★飛行した時、ホバリング中に機体が前後・左右に流れる時、一時的にトリムで微調整できます。
毎回流れる時は、キャリブレーションを実施します。
キャリブレーションしても流れが止まらない時は、プロペラやプロペラガードを点検します。
送信機とスマートフォンを使って操縦する方法
1.機体と送信機をペアリングする(参考 ペアリング方法)
2.スマホを機体のWiFiに接続する(参考 ペアリング方法)
3.アプリ SYMA GO を起動する
4.アプリの START をタップし操縦用画面を出す
スマホの画面に機体から送られてくる映像が表示されればOKです。
5.アプリの 画面上の操作パッドを消す
画面左下のアイコン をタップし Off にする。
表示したままでも問題ありませんが、画面上で邪魔になります。
6.これ以降は 送信機のみで操縦 と同じになります。(基本的な飛行の操作や飛行速度の設定、トリムの調整方法など)
飛行中にバッテリーが無くなると、機体後方のグリーンのLEDが点滅を始めます。
360度宙返り(フリップ)動作をする方法
宙返りをする時は、現在の高度より30cmぐらい上方へ回転しますので、周りの空間には十分注意が必要です。
●送信機で360度の宙返りをさせる方法
飛行中に右の肩の「360度宙返り」スイッチをクリックしたままで、下記のスティック操作をすると宙返りをします。
スティック操作
前進・・・前方宙返り 、後進・・・後方宙返り 、左・・・左へ側転 、右・・・右へ側転
アプリ SYMA GO のインストール と 各画面の機能説明
スマートフォン用のアプリは、iPhone版 と Android版 があります。
アプリ名 SYMA GO
スマホに合わせアプリをインストールしておきます。iPad でも使用できます。
商品を所有していなくてもインストールできますので、事前に確認もできます。
起動時の画面
 |
アプリ「SYMA GO」起動時の画面です。 中央下「START」で 操縦 画面 に切り替わる。 右下「HELP」で 説明 画面に切り替わる。 中国語と英語の切り替えができます。 |
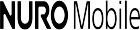
操縦用の画面(各アイコンの説明)
操縦用の画面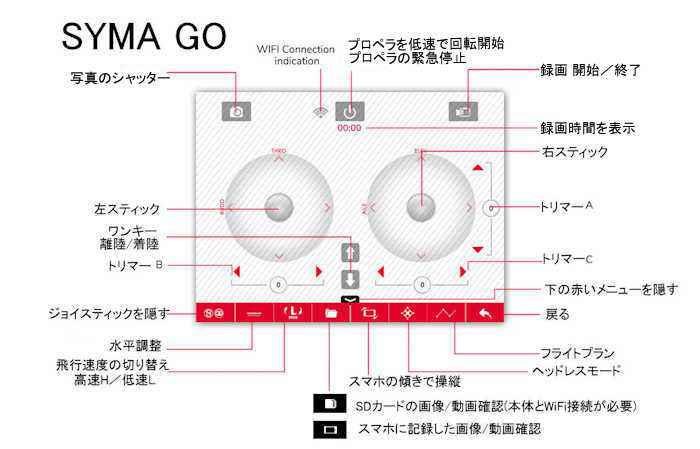 |
|
| 「ワンキー離陸/着陸」 ワンタッチで離陸や着陸が出来ます。 「ジョイスティックを隠す」 送信機を使って操縦する時、画面のスティックを非表示にし、機体から送られてくるリアルタイム映像を見やすく表示できます。 「水平調整」 機体のキャリブレーションを行い、前後左右への流れを小さくします。 「飛行速度の切り替え」 飛行速度を高速/低速に切替できます。 室内や屋外など状況に合わせた飛行を楽しめます。 |
「フライトプラン」 フリーハンドで描いた線上を飛行するようです。 (まだ実際の動作確認をしていません。) 「ヘッドレスモード」 機体がどの方向を向いていても、前進操作で遠ざかり後進操作で近づく飛行をします。 ヘッドレスモード時は、機体後部のグリーンのLEDが 3秒間点灯→消灯→3秒間点灯 を繰り返します。 「スマホの傾きで操縦」 右側のスティックがスマホの傾きに連動するので、スマホでも直感的に操縦が出来ます。 |
「ジョイスティックを隠す」 操縦用スティックを非表示にした画面  |
「フライトプラン」 フリーハンドで描いた線上を飛行するようです。 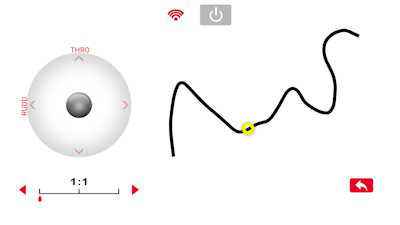 |
キャリブレーション(ジャイロリセット)の手順
飛行した時、ホバリング中に機体が前後・左右に流れるときに実施します。
キャリブレーションしても流れが止まらない時は、プロペラやプロペラガードを点検し、下記の●機体の流れを少なくする方法を実施します。
A.送信機で操縦する時の キャリブレーション手順
1.送信機と機体をペアリングした後、機体を水平な位置に置いて実施します。
2.右と左のスティックをそれぞれ右下に倒し、機体後部のグリーンのLEDが点滅したら中立に戻します。
3.LEDが点滅から点灯に変わるまで2~5秒待ちます。点灯したら完了です。
B.スマホで操縦する時の キャリブレーション手順
1.スマホと機体をペアリングした後、機体を水平な位置に置いて実施します。
2.画面左下の「水平調整」のアイコンをタップします。
3.機体後部のグリーンのLEDが点滅から点灯に変わるまで2~5秒待ちます。点灯したら完了です。
●機体の流れを少なくする方法
上記の手順で標準的なキャリブレーションを実施しても、ホバリングしていると機体が決まった方向に流れる(移動する)時は、下記の方法で流れを少なくすることが出来ます。
流れる原因は、プロペラガードやプロペラに傷がつき浮力にばらつきが出た時に起きやすいと思います。
調整するための台を作成する必要がありますので、適当な材料を用意します。
私が用意した材料は、スーパーマーケットの持ち帰り自由な箱の置き場にあった5mm厚の発泡スチロールの両面にビニールのような紙を張った物をもらって来て作りました。厚手の段ボール紙やベニヤ板のようなもので作れます。
| (製作例) 材料・・10cm角の平らな変形しない板。 片方の辺にスペーサーを張り付けて使用します。 調整用のスペーサーは 1 ~ 5mm ぐらいが良いそうです。 |
片側を持ち上げる為に、私は片方の辺に 5mm厚のスペーサー(板材)を仮付けしました。 厚くしたり、薄くしたりして調整します。 10mm厚のスペーサーを取り付けると調整しすぎてしまい、 機体が上昇できなくなってしまいました。 |
 |
 |
たとえば、機体が左前方に流れる場合 機体の左前方を傾斜の高いほう●に向けて置きます。 この状態でキャリブレーションを実施します。 |
赤い丸●が傾斜の高い方になります。 機体の流れるほうを傾斜の高い方に向けて置いたまま 上記で説明のキャリブレーションを実施。 飛行して確認しまだ流れる場合は、高さを調整して繰り返します。 |
 |
 |
モード2 における スティック操作一覧表
●飛行のための 送信機のスティック操作一覧表です
| モード2 | |
| 手動で プロペラ回転 |
(方法1) |
| 手動で プロペラ停止 |
(方法1) |
| 手動 離陸 |
プロペラが低速で回転しているとき左のスティックを奥へ徐々に倒すとプロペラの回転が上がり上昇します。 |
| 手動 着陸 |
左のスティックを手前に徐々に倒し下降させる。 |
| 自動 離陸 |
右肩の離陸/着陸スイッチをプッシュ |
| 自動 着陸 |
右肩の離陸/着陸スイッチをプッシュ |
| 上昇/下降 |
左のスティックを前後(奥と手前) |
| 前進/後退 |
右のスティックを前後(奥と手前) |
| 左右移動 |
右のスティックを前後(奥と手前) |
| 左右回転 |
左のスティックを左右 |
プロペラの取り付け方向とプロペラガード
プロペラ交換時に違った向きに取り付けると、飛行できませんので確認が必要です。
前後左右から見た時、必ず隣同士のプロペラのひねりは逆を向いています。
プロペラの表側に非常に小さな文字で、AやBのように記号が刻印されています。
AタイプとBタイプのプロペラの違いはひねりの向きのようです。
私はこの記号が見えづらいので、プロペラのひねりの向きで取り付け位置を確認しています。
プロペラガードは固定式となっています。
| カメラのある正面から見て 左側は反時計方向に回ると 上昇する向きのプロペラを取り付けます。 |
プロペラガードは固定式となっており 取り外しは出来ません。 |
 |
 |
プロペラの互換性
Hubsan社製 X4 HD H107C のプロペラが使用できました
まだ必要ありませんが、出たばかりの商品の為かプロペラやバッテリーの予備が見つかりません。
しかしこの商品は X4 HD H107C とモーター軸間の寸法が全く同じで、モーターのシャフト径も同じでしたので、試しに X4 HD H107C のプロペラを取り付け飛行させてみました。
飛行の安定性も飛行可能時間も全く変わらず、プロペラに互換性があることがわかりました。
プロペラの形状は長さと幅が少し異なります。
X4 HD H107C 用のプロペラ予備をたくさん持っているので助かりますが、高度維持機能のお陰で全く墜落しません・・・。
| 左は SYMA X21W用のプロペラ 長さ 46mm、最大幅 10mm |
右は X4 HD H107C 用のプロペラ 長さ 55mm、最大幅 8mm |
 |
|
バッテリー の 規格と寸法
バッテリーは交換できるようになっています。
ただし、コネクターの形状が所有している他のバッテリーと異なる為共有できそうもありません。(変換ケーブルを取り付けました)
飛行中にバッテリーが無くなると、機体後方のグリーンのLEDが点滅を始めます。
| 裏ブタを開くと手前にコネクタがあります | バッテリーを取り外した状態 取り付けスペース 奥36x幅28x厚み8mm |
 |
 |
| バッテリーの容量 3.7V 380mAh 1.4wh バッテリーの寸法 縦x横 26 x 26mm 厚み 7mm リード線 25mm SYMA のミニドローンには良く使われているようですが 始めて見たコネクタ形状でした。 |
 |
バッテリー の 変換ケーブル取り付け
標準のバッテリー(3.7V 380mAh)で約5分程度の飛行が出来ます。
しかし操縦に慣れてきたり、屋外で飛行する時には、1回の飛行では物足りなくなります。
手持ちのバッテリーを共有するのが経済的なので、手持ちのバッテリーの接続端子に合わせてみました。
機体を分解しメスの変換ケーブルを取り付けました。ただし、標準でついてきたバッテリーもそのまま使えるようにします。
取り付けに使用したメスの変換ケーブルは、海外通販 Banggoodにて「1 To 6 Balance Charger Cable」として販売されていたものを分解して使用しています。購入商品の一覧表にも記録しています。
★半田付けの工作がダメな場合は、オスとメスのケーブルを組み合わせて変換ケーブルを作成することも出来ます。(参考例)
実際に下記のような少し大きなバッテリーを取り付け飛行させてみましたが、前後左右への流れも発生せず全く問題なく飛行できました。
取り付けスペースのスペーサーは柔らかいので、少し厚いバッテリーを挿入しても何とかなりました。
手持ち3.7V 380mAh・・・約4~5分の飛行が出来ました。(長さが少し長くギリギリ取り付け出来ましたが、念のため輪ゴム止め)
手持ち3.7V 500mAh・・・約5~7分の飛行が出来ました。(長さがだいぶ長いため、電池カバーが半開きとなるので輪ゴムで止めました)
各バッテリーの寸法と重量
標準の 3.7V 380mAh(長さx幅x厚さ 26x26x7mm 、11g)
手持ち 3.7V 380mAh(長さx幅x厚さ 38x20x7.5mm 、10.5g)Hubsan X4 HD H107C 用 標準バッテリー
手持ち 3.7V 500mAh(長さx幅x厚さ 43x20x8.5mm 、13.5g)JJRC H37 Elfie 用に購入した追加バッテリー
| 現在のケーブルの付け根の被覆を少し剥がし、 メスの変換ケーブルを半田付けします。 変換ケーブルの取り出しの為、 カバーの一部を矢印のように切り欠きます。 切り欠きはいつものように、 カッターナイフの先をライターで炙りながらカット。 |
カバーの一部を切り欠いた部分から 変換ケーブルを外に出してカバーを組み付けます。 注意・・・SDカード付きのタイプの場合は他の場所から 引き出す必要があります |
 |
 |
切り欠いて取り出したメスの変換ケーブルです。 切り欠いた部分はメクラのカバーが付いていました。 SDカード付きの場合は、ここはSDカード挿入口になります。 |
機体上部から見てもわかりますが プロペラの邪魔にならないように 短くしています。 |
 |
 |
3.7V 380mAh のバッテリーを使用した場合。 少し長いバッテリーを取り付け接続しても ギリギリ大丈夫でした。 |
3.7V 380mAh のバッテリーを使用した場合。 バッテリーのケーブルを機体の外に取り出す切り欠きを つけていないので、蓋が少し持ち上がっています。 気になる時は輪ゴムで止めるか、切り欠きを入れます。 |
 |
 |
3.7V 500mAh のバッテリーを使用した場合。 裏側から見ると蓋が全く閉まらないのがわかります。 |
3.7V 500mAh のバッテリーを使用した場合。 裏側の横から見ると蓋が斜めに持ち上がっています。 |
 |
 |
3.7V 500mAh のバッテリーを使用した場合でも、 4本の足の方が長いので床に当たることは有りません。 輪ゴムだけで充分固定できます。 |
3.7V 500mAh のバッテリーを使用した場合でも、 プロペラの邪魔にはなりません。 全く問題なく安定した飛行ができました。 |
 |
 |
★半田付けがダメな場合は、オスとメスのケーブルを組み合わせて変換ケーブルを作成することも出来ます。(参考例)
下記画像の赤丸印のオス端子とメス端子をつなぎ合わせて変換ケーブルを作ります。
| オス端子 Syma X5HW X5HC RC Quadcotper Spare Parts 5 in 1 Charging Cable 海外通販Banggoodで 105円(送料無料) |
メス端子 DIY 1.25mm 2-Pin Micro Male Female Connector Plug Cable 海外通販Banggoodで 142円(送料無料) |
 |
 |
機体の分解方法 と プロペラの互換性
機体の分解方法
今回はバッテリーの変換ケーブルを取り付けるために分解してみました。
| まず機体下のビスを4本を外します。 次に赤い矢印の部分のプラスティックのカバーを、 先のとがったドライバーのようなもので外します。 |
 |
モーターのカバーの部分を持ち上げるようにして徐々に開きます。 カメラレンズの縁飾りの所を少しこねるようにして、注意しながら裏蓋を外します。 赤い矢印のところの被覆を少し剥がして、変換ケーブルを半田付けします。 |
 |